
Общие положения
Современные посевные машины как и многие другие мобильные сельскохозяйственные агрегаты, представляют собой сложные управляемые динамические системы, функционирование которых протекает в условиях непрерывно изменяющихся внешних воздействий, обусловленных многочисленными и разнообразными факторами. В своем большинстве эти факторы являются случайными (в вероятностно-статистическом смысле), что, естественно, накладывает отпечаток случайности и на конечные показатели технологических процессов, выполняемых посевными машинами.
В связи с этим при решении задач, связанных с выбором и обоснованием параметров посевных машин, а также режимов их работы, применение методов классической механики, основанных на строго детерминированных закономерностях протекания рабочих процессов, является недостаточным, а нередко и невозможным, так как условия работы этих машин значительно сложнее и разнообразнее.
В последнее время для описания поведения, анализа и синтеза сельскохозяйственных машин начинают широко использоваться вероятностно-статистические методы, и в первую очередь методы теории случайных процессов. Этому в значительной мере способствовали основополагающие труды по динамике сельскохозяйственных агрегатов П. М. Василенко, А. Б. Лурье, А. П. Иофинова, А. П. Терехова, В. П. Рослякова, В. А. Ксендзова, С. В. Кардашевского и других авторов [70, 103, 205, 264, 284, 285].
В основе вероятностно-статистических методов исследования лежит построение математических моделей, имитирующих с той или иной степенью точности поведение (функционирование) реальных объектов.
Применительно к решению задач анализа или синтеза сложных технических систем, в частности сельскохозяйственных машин, в основу построения моделей положена предпосылка о том, что в условиях нормального функционирования они (технический объект) представляют собой динамическую систему, осуществляющую некоторое преобразование входных переменных (возмущений) в выходные, которые показывают, как работает машина в условиях нормальной эксплуатации.
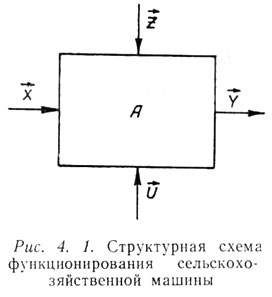
В общем случае расчетная схема сельскохозяйственных агрегатов представляется в виде многомерной динамической системы, на входе которой действуют (рис. 4.1) векторы-функций условий работы (возмущений) X = {x1 (t), x2 (t), ..., xn (t)} и управления U = {u1 (t), u2 (t), ..., uk (t)}. Вектор U является выходным для управляющих устройств, образующих в общем случае управляющую систему. С управляющей системой связано и задающее воздействие, т.е. вектор-функция Z = {z1 (t), z2 (t), ..., ze (t)}, показывающая, как должен себя вести управляемый объект. Выходные переменные обычно даются также в виде вектор-функции Y = {y1 (t), y2 (t), ..., ym (t)}, характеризующей поведение машины в действительных реальных условиях эксплуатации, то есть эта вектор-функция определяет технологические, энергетические и другие показатели работы машины или системы управления в целом.
Рис. 4.1. Структурная схема функционирования сельскохозяйственной машины.
Число составляющих n, k, l, m векторов зависит от типа машины, системы учета ее работы и других факторов,обусловленных целью и характером поставленной задачи. Они определяют фактический объем и содержание информации, на основе которых будет разрабатываться и реализовываться математическая модель.
Входные и выходные переменные для абсолютного большинства сх агрегатов, в том числе и для посевных машин, являются случайными процессами и при анализе их работы каждому входному процессу ставят в соответствие другой - выходной процесс. Если на входе машины действует переменная x (t), а на выходе y (t), то математическое описание поведения машины как одномерной системы представляется зависисмостью y (t) = A[x (t)], где А - оператор системы, показывающий, какие математические действия необходимо выполнить, чтобы по заданной функции x (t) определить выходной процесс y (t).
Построение математической модели машины и заключается в установлении (выборе) вида оператора А, связывающего входные x (t) и выходные y (t) переменные.
Нахождение оператора (построение математической модели) производится различными методами - теоретическими и экпериментальными. Сущность первого состоит в том, что сложную систему приводят к более простой (эквивалентной), позволяющей описать ее поведение аналитическими методами, например, при помощи дифференциальных уравнений динамики системы материальных точек.
Для большинства сх машин теоретическое построение математической модели представляет собой весьма трудную, а подчас и неразрешимую задачу. В этих случаях обычно прибегают к экпериментальным методам и, в основном, к методам идентификации, которые базируются на опытной информации о входных и выходных процессах машин, полученной в условиях нормального функционирования.
При использовании метода идентификации сх машины рассматриваются как линейные стационарные системы, а операторы, устанавливающие связь между выходным процессом y (t) и входным x (t), представляются в различных формах: алгебраических, дифееренциальных, интегральных или других видов функциональных уравнений.
При исследовании сх агрегатов в качестве операторов обычно принимаются:
а) передаточная функция W(s), так что y (s) = W (s) * x (s), (4.2.), где x (s) и y (s) - изображения по Лапласу входной и выходной переменных;
б) частотная передаточная функция W (iω), которая определят свойства машины в частотной области;
в) импульсная переходная функция ω (t), определяющая свойства машины во временной области, причем
![]() (4.3);
(4.3);
г) линейное дифференциальное уравнения с постоянными коэффициентами вида
 (4.4);
(4.4);
д) линейный оператор интегрирования  (4.5).
(4.5).
Эти операторы характеризуют в конечном счете одни и те же свойства машины как динамической системы. При случайных входных и выходных переменных операторами могут служить и уравнения, связывающие математические ожидания выходных переменных относительно входных (уравнения регрессии).
Если входная x (t) и выходная y (t) функции являются стационарными случайными процессами, то связь между статистическими характеристиками этих процессов осуществляется через оператор

где Sx (ω) и Sy (ω) -спектральные плотности процессов; Sxy - взаимная спектральная плотность входного и выходного процессов; |Wxy (iω)| = Axy (ω) - амплитудная частотная характеристика машины по отношению к входу x(t).
Из соотношения (4.6) получается
 (4.8.)
(4.8.)
а из соотношения (4.7)
 (4.9)
(4.9)
причем ![]() - модуль взаимной спектральной плотности входа x (t) И выхода y(t).
- модуль взаимной спектральной плотности входа x (t) И выхода y(t).
Соотношения (4.8) и (4.9) широко используются для определения частотных характеристик и передаточных функций сх машин по результатам их испытаний в условиях нормального функционирования. Так, в частности, для ряда машин по соотношениям (4.8) и (4.9) на основе значительного статистического материала было установлено, что передаточные функции этих машин и их рабочих органов относительно характерных входных воздействий, наблюдаемых в реальных условиях эксплуатации, могу быть представлены в первом приближении как
 (4.10)
(4.10)
или
 (4.11)
(4.11)
где τ, Т1 и Т2 - постоянные времени; К - коэффициент усиления.
Таким образом, построение одномерной математической модели машины рассматриваемым методом сводится к выполнению следующих операций: а) экспериментальной (в условиях нормальной эксплуатации) записи процессов x (t) и y (t) на входе и выходе машины; б) вычислению спектральных плотностей процессов; в) определению по соотношениям (4.8) и (4.9) амплитудной частотной характеристики Axy (ω); г) аппроксимации характеристики Аху(со) аналитическим выражением, которому соответствует
чаще всего передаточная функция вида (4.10) и (4.11); д) вычислению
коэффициентов передаточных функций.
Для выполнения указанных операций обычно составляются алгоритмы и программы вычислений на ЭЦВМ с использованием ансамблей реализации входных и выходных случайных процессов x(t)Hy(t).
Несмотря на большое значение и ценность математических моделей, составленных по методу идентификации для решения задач анализа и синтеза сельскохозяйственных машин, они являются весьма приближенными и не дают достаточных оснований для прогнозирования выходных процессов (показателей работы) и управления ими в условиях нормального функционирования, так как в действительности машины представляют собой сложные многомерные динамические системы, которым свойственны наличие внутренних помех (отказов), непостоянство параметров динамических характеристик, нелинейность связей, нестационарность возмущающих воздействий и т. д. Кроме того, по этим моделям в ряде случаев не представляется возможным прогнозировать поведение системы вне области изменения переменных, для которых были получены экспериментальные данные.
Поэтому при определении операторов возникает необходимость оценить, в какой мере выходная переменная y(t) согласована с выбранным для модели входным воздействием x(t), т. е. оценить степень достоверности модели, построенной с учетом принятых априори допущений относительно ее структуры и характера возмущающих воздействий.
Основным и наиболее существенным недостатком вышеуказанных математических моделей является то, что они, в целом характеризуя динамические свойства рассматриваемой системы в различных условиях, не отражают связей выходных переменных (показателей работы) с ее конкретным конструктивным строением, т. е. с геометрическими и режимными параметрами элементов, составляющих данную систему. Иначе говоря, экспериментально полученные операторы не «расшифрованы» (не увязаны) через параметры изучаемых систем (машины, агрегата, узла и т. д.), что лишает возможности использования их при проектировании и расчете новых машин и их рабочих органов.
Против этого можно возразить указанием на то, что при разработке модели (оператора) системы в состав составляющих векторов-функций F, и и Z условий работы (входных возмущений), управления и задающего воздействия (см. рис. 4.1) следует включать все или большинство предполагаемых априори факторов,которые в той или иной мере оказывают влияние на составляющие —>вектора-функции Y, и рассматривать машину (агрегат и т. д.) как многомерную динамическую систему, что позволит определить ее поведение в целом и даст возможность установить совокупное и раздельное влияние выбранных (заданных) входных факторов на выходные.
Такой путь, безусловно, возможен и в ряде случаев остается пока что единственным, но он связан с огромным объемом экспе- рихментных и вычислительных работ, требует наличия сложной, а подчас специальной аппаратуры и вызывает определенные трудности в анализе и синтезе получаемых результатов. Пример тому—модель зерновой сеялки, приведенная в работе [125], согласно которой общее число только учтенных факторов условий работы, управления и задающего воздействия, кроме составляющих выходного вектора-функции, насчитывается более 15, что, естественно, делает решение данной задачи методами идентификации практически невозможным. Поэтому в настоящее время при исследовании динамики сельскохозяйственных машин в большинстве случаев используются одномерные линейные системы, несмотря на присущие им недостатки. В связи с этим постановку задач математического моделирования, а следовательно, и задач анализа и синтеза объектов сельскохозяйственной техники во многих случаях, как отмечает академик П. М. Василенко, нельзя признать корректной [105].
Большие перспективы для решения задач анализа и синтеза сельскохозяйственных машин имеют механико-статистические (комбинированные) методы, основанные на одновременном и совместном использовании аналитических (механико-математических) и вероятностно-статистических методов.
Механико-статистические методы значительно упрощают построение математических моделей (операторов) динамических систем и оказываются достаточно эффективными при исследовании мобильных сельскохозяйственных агрегатов, выходными параметрами технологических процессов которых являются показатели дозирования и распределения обрабатываемых материалов, а основные возмущающие переменные, действующие на входе системы, представляют собой случайные процессы, обусловливающие колебательный характер поведения машины.
Однако следует отметить, что эти методы применительно к исследованиям сельскохозяйственных машин и их технологических процессов, как замечает профессор А. Б. Лурье, практически не разработаны [286]. Нам также не удалось найти работы, в которых были бы освещены эти вопросы.
Основными причинами этого, вероятно, является отсутствие до недавнего времени [104] четкой классификации сельскохозяйственных агрегатов как динамических систем, а также унифицированных математических моделей, описывающих поведение определенной группы машин, выполняющих идентичные или близкие по характеру технологические процессы. Это привело, с одной сто- доны, к тому, что многие авторы [59, 75, 92, 125, 204, 242, 290] при исследовании одних и тех же или близких по назначению и выполняемому процессу машин с одинаковой постановкой задачи используют совершенно разные математические модели, причем без должного обоснования и оценки степени соответствия их реальным процессам; с другой — нередко построение математических моделей, причем весьма сложных, вызывается не столько необходимостью применения их для решения конкретной задачи, сколько желанием автора показать свой уровень эрудиции в области математики.
Наличие унифицированных математических моделей, на наш взгляд, позволило бы, во-первых, избежать указанных выше негативных явлений, во-вторых — ускорить разработку новых машин, а главное, повысить качество их еще на стадии проектирования и расчета.
Не задаваясь целью детально осветить вопросы содержания механико-статистических (комбинированных) методов исследования динамических систем, покажем на примере анализа и синтеза овощной сеялки точного высева возможность и эффективность их применения.


 ДДоставка сельхозтехники и запасных частей, оросительных систем, насосов во все города России (быстрой почтой и транспортными компаниями), так же через дилерскую сеть: Москва, Владимир, Санкт-Петербург, Саранск, Калуга, Белгород, Брянск, Орел, Курск, Тамбов, Новосибирск, Челябинск, Томск, Омск, Екатеринбург, Ростов-на-Дону, Нижний Новгород, Уфа, Казань, Самара, Пермь, Хабаровск, Волгоград, Иркутск, Красноярск, Новокузнецк, Липецк, Башкирия, Ставрополь, Воронеж, Тюмень, Саратов, Уфа, Татарстан, Оренбург, Краснодар, Кемерово, Тольятти, Рязань, Ижевск, Пенза, Ульяновск, Набережные Челны, Ярославль, Астрахань, Барнаул, Владивосток, Грозный (Чечня), Тула, Крым, Севастополь, Симферополь, в страны СНГ:Киргизия, Казахстан, Узбекистан, Киргизстан, Туркменистан, Ташкент, Азербайджан, Таджикистан.
ДДоставка сельхозтехники и запасных частей, оросительных систем, насосов во все города России (быстрой почтой и транспортными компаниями), так же через дилерскую сеть: Москва, Владимир, Санкт-Петербург, Саранск, Калуга, Белгород, Брянск, Орел, Курск, Тамбов, Новосибирск, Челябинск, Томск, Омск, Екатеринбург, Ростов-на-Дону, Нижний Новгород, Уфа, Казань, Самара, Пермь, Хабаровск, Волгоград, Иркутск, Красноярск, Новокузнецк, Липецк, Башкирия, Ставрополь, Воронеж, Тюмень, Саратов, Уфа, Татарстан, Оренбург, Краснодар, Кемерово, Тольятти, Рязань, Ижевск, Пенза, Ульяновск, Набережные Челны, Ярославль, Астрахань, Барнаул, Владивосток, Грозный (Чечня), Тула, Крым, Севастополь, Симферополь, в страны СНГ:Киргизия, Казахстан, Узбекистан, Киргизстан, Туркменистан, Ташкент, Азербайджан, Таджикистан.
{kind=link}